
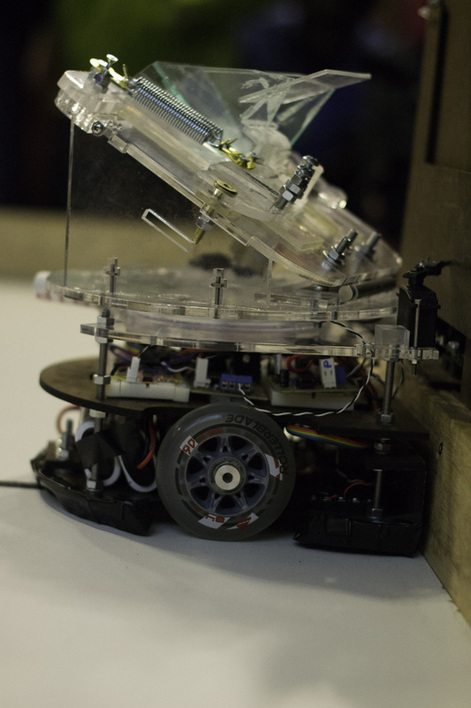
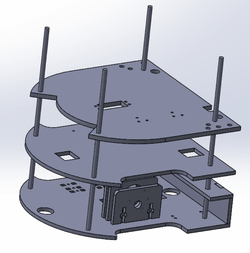
Hardware was mounted throughout the three layers of the chassis.
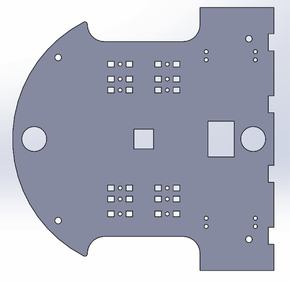
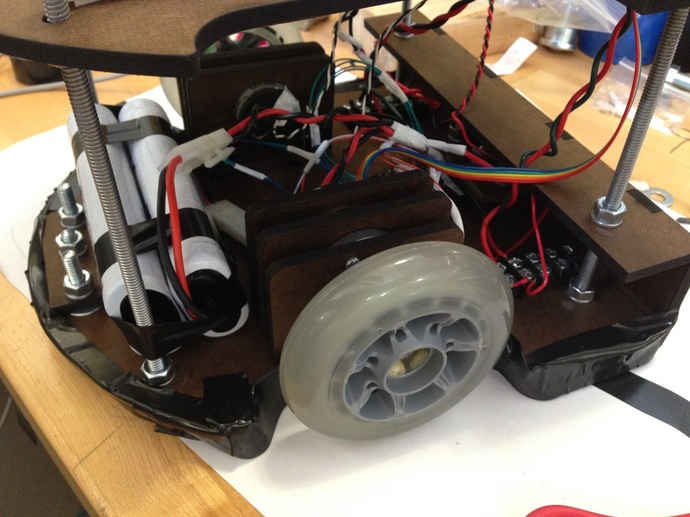
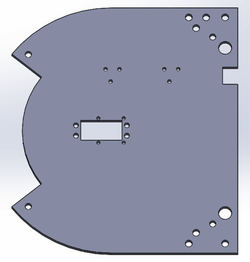
The base level was the location of the mounts for the tape sensors, the motors, batteries, the castor wheels, and main power and ground terminals.
The motor selection ultimately was determined by the speed. Initially, Jameco 161382 (145 rpm) motors were selected. However, testing with the tape sensors and wheels indicated that the motors were too fast to reliably control.
Two 60 rpm motors were secured to the base floor with a three-piece mount, which adequately prevented undesirable moment of the motors. The shafts were positioned in the lowest position, which provided a ½” clearance under the base floor with the wheels attached. These motors provided adequate torque while enabling increased control over tape sensing and tracking.
The tape sensor mounts provided flexibility for testing the desired height of the sensors. Three tape sensors were used on the base floor of JackBot. One was centered between the two wheels, and the other two were 0.75” apart near the back of the robot. The center sensor was used to initially find the tape, and then JackBot would rotate in place until the back two sensors were also on the line.
The motor selection ultimately was determined by the speed. Initially, Jameco 161382 (145 rpm) motors were selected. However, testing with the tape sensors and wheels indicated that the motors were too fast to reliably control.
Two 60 rpm motors were secured to the base floor with a three-piece mount, which adequately prevented undesirable moment of the motors. The shafts were positioned in the lowest position, which provided a ½” clearance under the base floor with the wheels attached. These motors provided adequate torque while enabling increased control over tape sensing and tracking.
The tape sensor mounts provided flexibility for testing the desired height of the sensors. Three tape sensors were used on the base floor of JackBot. One was centered between the two wheels, and the other two were 0.75” apart near the back of the robot. The center sensor was used to initially find the tape, and then JackBot would rotate in place until the back two sensors were also on the line.
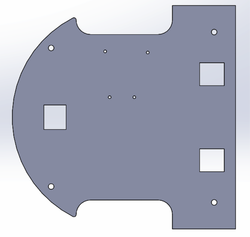
The second level provided mounting for the Arduino as well as access slots for wiring.
The third level incorporated a servo mount, which is the component that turned the shooter mechanis
